Научная группа, состоящая из робототехников из Делфтского технического университета, биологов из Вагенингенского университета и Ольденбургского университета имени Карла фон Осецкого, изучили поведение медоносных пчёл и создали уникальную систему навигации для роботов и дронов «Bee-Nav».
Голландские и немецкие учёные скопировали метод ориентирования пчёл, летающих на далёкие расстояния, и успешно возвращающихся в собственный улей обратно.
Как ведёт себя пчела?
Покидая улей в первый раз, пчела делает ознакомительный полёт на небольшом расстоянии от «дома», чтобы запомнить близлежащие ориентиры. С каждым последующим вылетом расстояние увеличивается. Во время полёта пчела оценивает преодолённое расстояние и направление, ориентируясь на визуальные сигналы («маячки») во время движения.
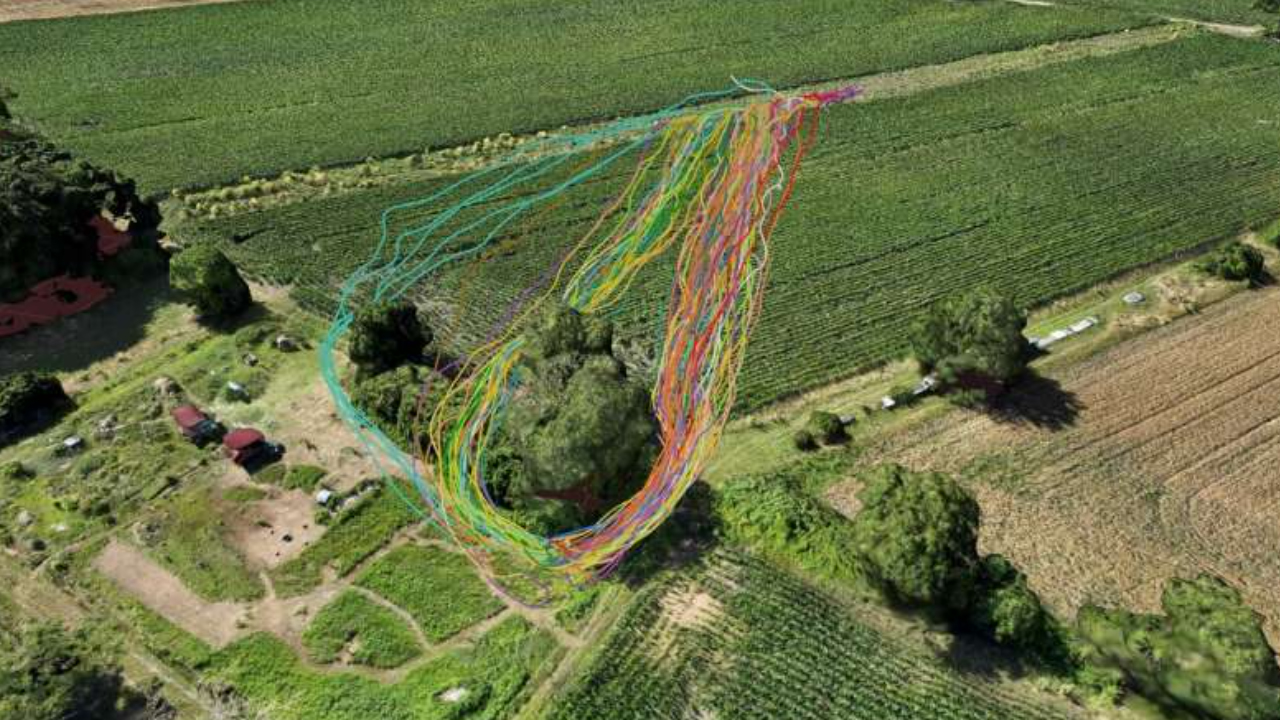
Немногим ранее группа ученых из Фрайбургского университета под руководством нейробиолога и специалиста по биологии поведения профессора Эндрю Строу изучала поведение медоносных пчел во время полёта. Для эксперимента на нескольких насекомых, летающих между своим ульем и источником пищи, расположенным в сельскохозяйственной зоне примерно в 120 метрах от улья, был прикреплён небольшой светоотражающий маркер. С помощью дрона, следящего за полётом пчёл, данные отражённого от маркеров света посылались на компьютер, который фиксировал местоположение насекомого с точностью несколько миллисекунд.
Результаты исследования показали, что каждая медоносная пчела прокладывает свой уникальный маршрут, ориентируясь по приметным объектам на местности, и с максимальной точностью придерживается его как при вылете, так и при возвращении.
Как работает система навигации для роботов и дронов «Bee-Nav»?
Сначала дрон делает короткий ознакомительный полет недалеко от дома, во время которого он делает панорамные снимки окружающей местности. Нейронная сеть объёмом всего 3,4 килобайта анализирует изображения, чтобы определять направление и расстояние до дома.
«Как и насекомое, робот не всегда может точно знать, где его дом», — говорит Декуан Оу, кандидат наук из Делфтского технического университета и автор научной статьи в журнале Nature. — Дом может быть слишком маленьким, чтобы его можно было разглядеть, или спрятанным за деревьями. Поэтому мы обучили нейронную сеть, используя одометрические данные о направлении и расстоянии до дома, хотя со временем они становятся менее точными. Главный вопрос заключался в том, будет ли этого достаточно, чтобы робот научился возвращаться домой».
В ходе эксперимента в помещении дрон двигался быстрее на больших расстояниях и медленнее по мере приближения к дому. Во всех случаях робот успешно возвращался домой.

Следующие испытания прошли на открытом воздухе в голландской исследовательской лаборатории Unmanned Valley в Валкенбурге. Дрон пролетел более 600 метров и все равно вернулся домой, используя нейронную сеть размером всего 42 килобайта. В ветреную погоду на улице точность снизилась до 70%. Одна из основных причин заключалась в том, что из-за ветра дрон наклонялся, и его изображения было сложнее использовать для навигации.
Исследования продолжаются, и, по мнению учёных, очень обнадёживают. Одним из перспективных направлений использования системы навигации «Bee-Nav» станет мониторинг теплиц с помощью дронов: осмотр посевов, выявление болезней или вредителей на ранней стадии, в результате чего ожидается повышение урожайности и сокращение количества отходов.
По материалам сайта Techxplore